چکیده
اینورتر اساساً یک رابط بین منبع DC مانند سلول های فتوولتائیک و شبکه های AC است. توپولوژی های اینورتر زیادی وجود دارد
اما اعوجاج جریان خروجی و بازده دو پارامتر اصلی برای انتخاب اینورترها هستند. دو توپولوژی از این قبیل هستند
در اینجا شرح داده شده است. در این مقاله، تکنیک SPWM (Sinusoidal Pulse Width Modulation) (مدولاسیون عرض پالس سینوسی) اینورترهای تک قطبی و دوقطبی ارائه شده است.
مدل های ارائه شده در “متلب سیمولینک” شبیه سازی شده اند. توپولوژی های اینورتر H-Bridge (تک قطبی و دو قطبی) از سوئیچ های الکترونیکی قدرت تشکیل شده اند و با پالس های دامنه ثابت با چرخه کاری متفاوت برای هر دوره تغذیه می شوند.
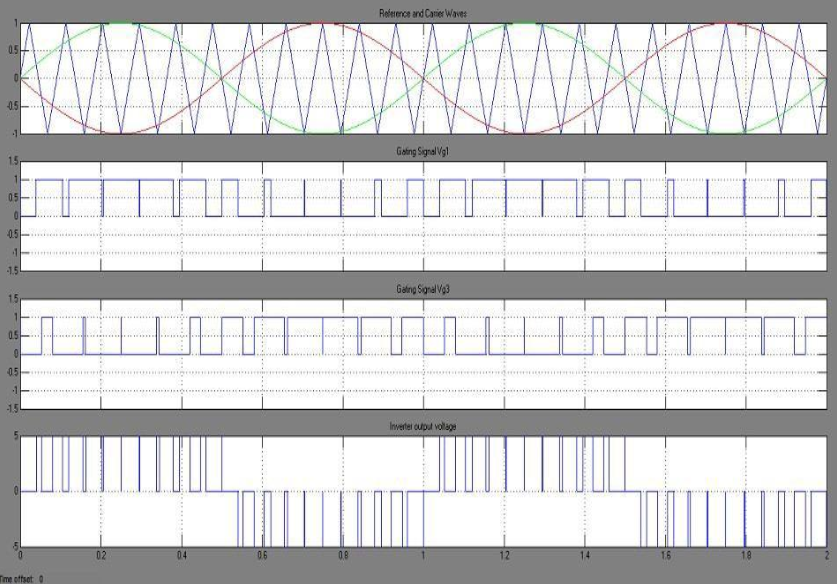
پالس های SPWM با مقایسه دو موج – یک موج حامل که در این حالت مثلثی است و یک موج تعدیل کننده تولید می شود.
موج مرجع که فرکانس آن فرکانس مورد نظر است که در این حالت سینوسی است. این اینورتر مدولاسیون عرض پالس
با مدار ساده و طرح کنترل ناهموار مشخص می شود که تکنیک SPWM برای به دست آوردن کنترل ولتاژ خروجی اینورتر است. و محتوای هارمونیک آن را کاهش دهد.
مقدمه
وظیفه اصلی مدارهای اینورتر تبدیل ورودی DC به خروجی AC است. اینورتر را می توان بر اساس پارامترهای زیادی طبقه بندی کرد.
اما با در نظر گرفتن چیدمان کلیدهای الکترونیک قدرت عبارتند از:
اینورتر نیم پل و اینورتر پل کامل. یک اینورتر پل کامل از دو پایه تشکیل شده است که هرکدام از دو کلید نیمه هادی تشکیل شده است که بار (load) به نقطه های مرکزی دو پایه متصل می شود.
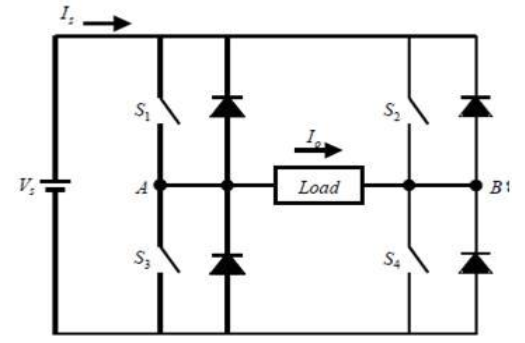
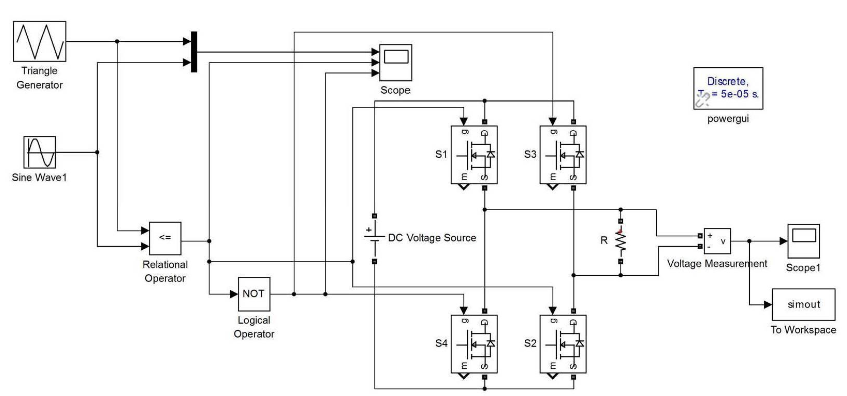
همانطور که در شکل 1 مشاهده می شود، چهار کلید نیمه هادی S1، S2، S3، S4 با بار متصل به نقاط میانی دو پایه شکل H را تشکیل می دهند، از این رو به نام اینورتر H-Bridge نیز شناخته می شود. دیودهای بازخورد برای همه سوئیچ ها قابل استفاده است. منبع تغذیه Vs به H-Bridge متصل شده است. سوئیچ های S1، S2، S3، S4 را می توان در سه ترتیب مختلف سوئیچ کرد:
- وقتی S1 و S4 روشن می شوند + Vs در خروجی به دست می آید
- وقتی S2 و S3 روشن می شوند – Vs در خروجی به دست می آید
- وقتی S1 و S2 یا S3 و S4 با هم روشن می شوند ولتاژ صفر در خروجی به دست می آید.
مدولاسیون عرض پالس
تغییر چرخه وظیفه سیگنال PWM یک ولتاژ در دو سر بار با یک الگوی خاص ارائه می دهد که به صورت AC ظاهر می شود که یک سیگنال سینوسی خالص پس از عبور از یک فیلتر پایین گذر به دست می آید. الگویی که در آن چرخه وظیفه سیگنال PWM با استفاده از اجزای آنالوگ ساده یا یک میکروکنترلر دیجیتال قابل پیاده سازی است. هر یک از دو توپولوژی PWM سینوسی تولید می کنند که خروجی اینورتر را کنترل می کند.
سیگنال های PWM کاربرد گسترده ای در الکترونیک مدرن پیدا می کنند. برخی از این دلایل عبارتند از:
کاهش تلفات برق : مدارهای سوئیچ مصرف برق کمتری دارند زیرا دستگاه های سوئیچینگ اینگونه هستند
تقریباً همیشه خاموش (جریان کم به معنای توان کم) یا سخت روشن (افت ولتاژ پایین به معنای توان کم).
آسان برای تولید : سیگنال های PWM بسیار آسان برای تولید. بسیاری از میکروکنترلرهای مدرن شامل سخت افزار درون تراشه PWM هستند. استفاده از این سخت افزار اغلب پردازش بسیار کمی را از ریزپردازنده می گیرد و می تواند بدون تداخل در اجرای کد در پس زمینه اجرا شود.
تبدیل دیجیتال به آنالوگ : این واقعیت که چرخه وظیفه سیگنال PWM را می توان با روش های ساده شمارش با دقت کنترل کرد یکی از دلایلی است که می توان از سیگنال های PWM برای انجام تبدیل دیجیتال به آنالوگ استفاده کرد.
تکنیک PWM مورد نظر باید دارای ویژگی های زیر باشد:
- استفاده درست از ولتاژ DC قابلیت استفاده از ولتاژ بالا در مدار را می دهد.
- خطی بودن کنترل ولتاژ.
- دامنه کم هارمونیک مرتبه پایین ولتاژ خروجی برای به حداقل رساندن محتوای هارمونیک جریان های خروجی.
- تلفات کم سوئیچینگ در کلیدهای اینورتر.
- زمان کافی برای عملکرد صحیح کلیدهای اینورتر و سیستم کنترل.
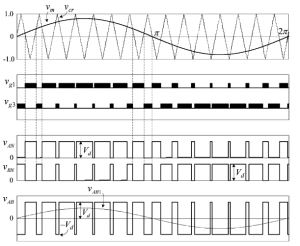
در SPWM (مدولاسیون عرض پالس سینوسی) دو سیگنال با هم مقایسه می شوند. سیگنال مرجع تعدیل کننده سینوسی و موج حامل مثلثی است. پالس های دروازه ای با مقایسه دو سیگنال تولید می شوند و عرض هر پالس نسبت به دامنه موج سینوسی متغیر است. فرکانس سیگنال مرجع فرکانس خروجی اینورتر را تعیین می کند و دامنه پیک مرجع شاخص مدولاسیون و مقدار RMS ولتاژ خروجی را کنترل می کند.
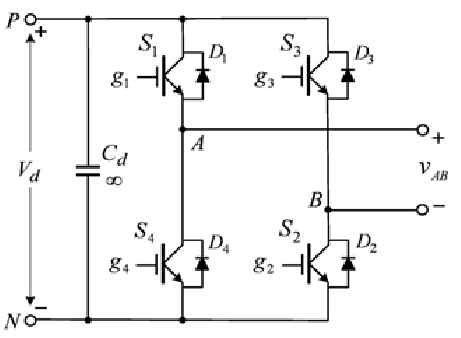
مدار اینورتر پل H برای هر دو طرح یکسان است. در شکل بالا برای اینورتر تک قطبی و دو قطبی مدار پل H متشکل از IGBT را در نظر بگیرید.
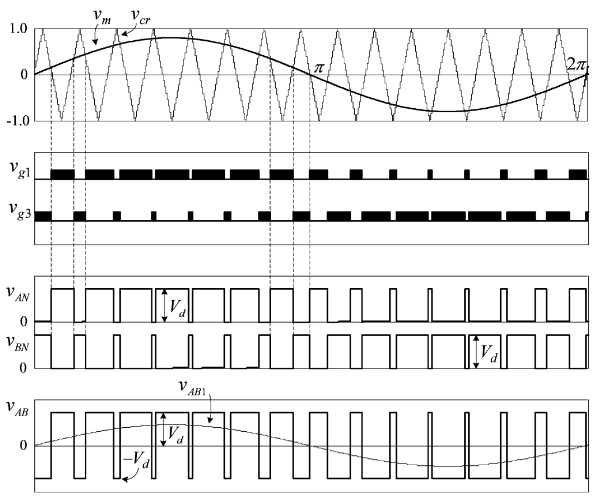
اینورتر PWM دو قطبی
کلیدهای بالایی و پایینی در یک لگ اینورتر به طور مکمل کار می کنند. بدین صورت که هنگامی که یک کلید روشن شود کلید دیگر خاموش میشود. بنابراین باید تنها دو سیگنال دروازه مستقل vg1 و vg3 را در نظر بگیریم که با مقایسه موج تعدیل کننده سینوسی vm و موج حامل مثلثی vcr تولید می شوند. ولتاژهای ترمینال اینورتر با VAN و VBN نشان داده می شوند و ولتاژ خروجی اینورتر برابر است با: VAB = VAN-VBN. از آنجایی که شکل موج VAB بین مثبت و منفی تغییر می کند ولتاژهای dc این طرح PWM دوقطبی (bipolar) نامیده می شود.
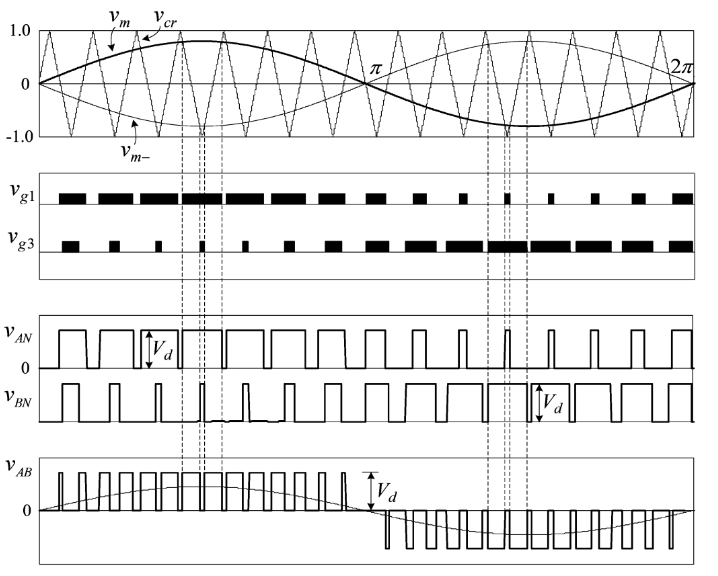
اینورتر PWM یک قطبی
مدولاسیون تک قطبی معمولاً به دو موج تعدیل کننده سینوسی vm و vm- نیاز دارد که فرکانس و اندازه یکسانی دارند اما با 180 درجه اختلاف فاز. دو موج تعدیل کننده با یک موج حامل مثلثی مشترک vcr مقایسه می شوند تا دو سیگنال گیتینگ vg1 و vg3 برای دو سوئیچ فوقانی S1 و S3 تولید شوند. می توان مشاهده کرد که دو دستگاه بالایی به طور همزمان سوئیچ نمی کنند، که از PWM دوقطبی متمایز میشود که در آن هر چهار دستگاه به صورت همان زمان خاموش و روشن می شوند.
ولتاژ خروجی اینورتر بین صفر و + Vd در نیم سیکل مثبت یا بین صفر و – Vd در طول نیم سیکل منفی فرکانس اصلی تغییر میکند به همین خاطر این طرح مدولاسیون تک قطبی نامیده می شود. این اینورتر سوئیچ تک قطبی تلفات سوئیچینگ را کاهش می دهد و EMI کمتری تولید می کند. بر اساس کارآیی، به نظر می رسد که اینورتر سوئیچینگ تک قطبی مزیت دارد.
تعدیل بیش از حد زمانی اتفاق می افتد که شاخص مدولاسیون دامنه ma بزرگتر از واحد باشد که باعث کاهش تعداد پالسها ها در شکل موج ولتاژ خط به خط که منجر به ظهور هارمونیک های مرتبه پایین تر می شود. علاوه بر این، بریدگی و عرض پالس نزدیک به مرکز نیم چرخه مثبت و منفی تمایل به ناپدید شدن دارد. برای تکمیل عملیات سوئیچینگ دستگاه، حداقل بریدگی و عرض پالس باید حفظ شود. هنگامی که بریدگی ها و پالس های حداقل عرض کاهش می یابد، مقداری پرش گذرا و جریان بار وجود خواهد داشت.
شبیه سازی متلب
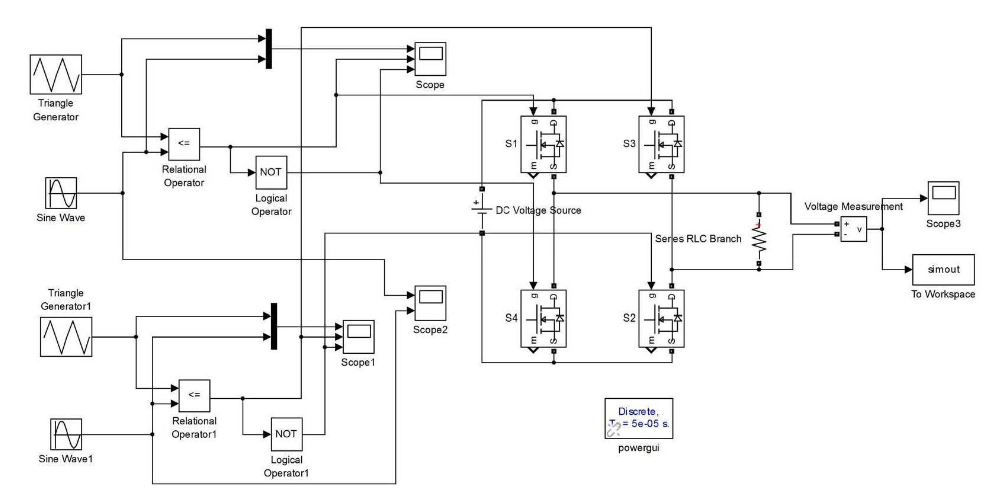
مدل MATLAB- Simulink اینورتر تک قطبی مطابق شکل 5 و برای اینورتر دوقطبی مطابق شکل زیر می باشد.
ژنراتور مثلثی و مولد موج سینوسی به ترتیب برای تولید موج حامل و موج تعدیل کننده استفاده می شود.
فرکانس حامل 11 هرتز و فرکانس موج مرجع 1 هرتز است. شاخص مدولاسیون را می توان با تغییر تغییر داد
دامنه موج تعدیل کننده سینوسی شکل موج برای شاخص مدولاسیون 1.0 است

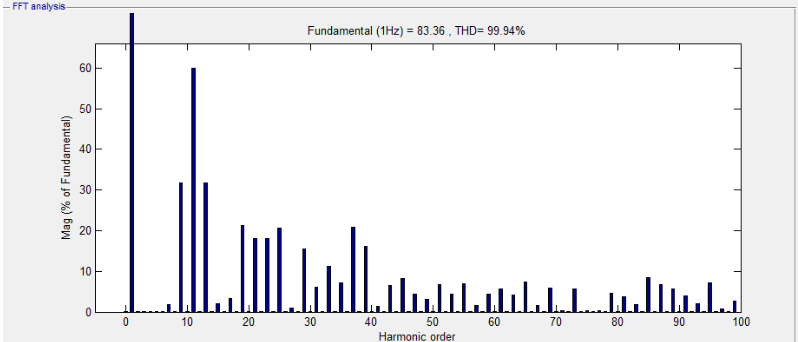
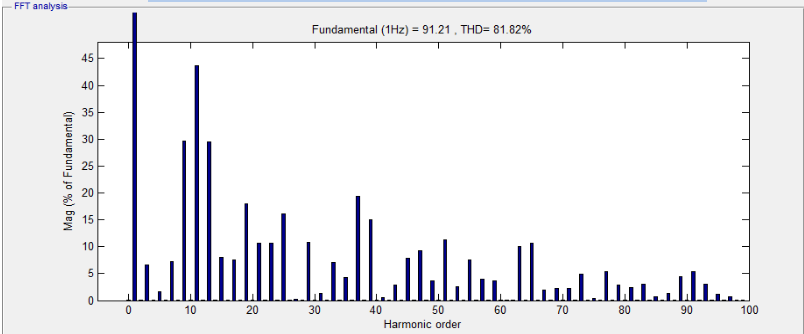
تجزیه و تحلیل FFT اینورتر PWM تک قطبی برای شاخص مدولاسیون 1.0 و برای 1.2. که یک مورد مدولاسیون بیش از حد است همانطور که در شکل های زیر نشان داده شده است.
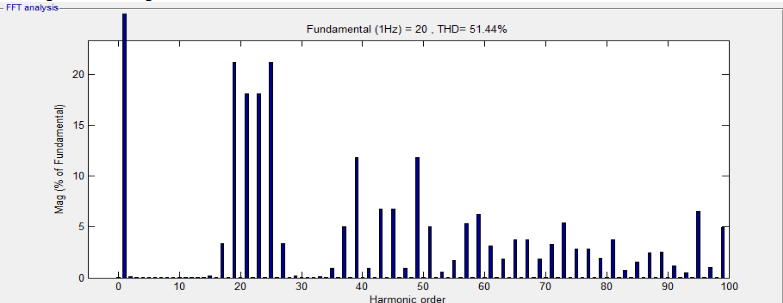
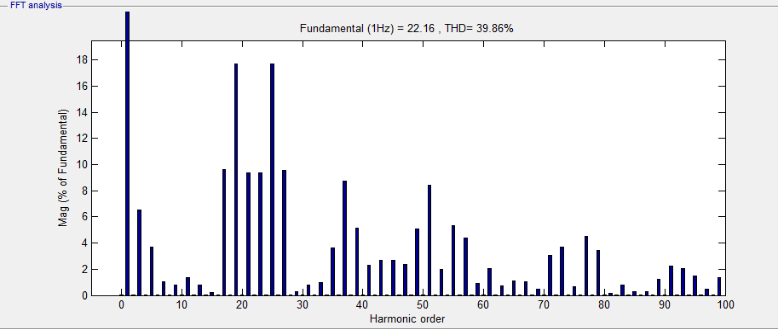
به طور مشابه برای اینورتر دوقطبی، تجزیه و تحلیل FFT برای شاخص مدولاسیون 1.0 و بیش مدولاسیون با شاخص مدولاسیون 1.2 نشان داده شده است. به وضوح می توان نتیجه گرفت که اینورترهای PWM تک قطبی از نظر کارایی بهتر و THD (Total Harmonic Distortion) در مقایسه با اینورتر PWM دوقطبی پایین تر هستند.
نتیجه گیری
تبدیل موج سینوسی خالص DC/AC کمترین مقدار هارمونیک را به یک دستگاه الکتریکی وارد میکند، اما این روش هزینه بیشتری دارد. از آنجایی که موج سینوسی AC باید از منبع DC تامین شود، سوئیچینگ همچنان باید انجام شود. در این حالت سوئیچینگ با منطقی خاص صورت می گیرد به طوری که انرژی تحویل شده به یک بار به انرژی به موج سینوسی خالص نزدیک شود. اینورتر تک قطبی با مدار فیلتر در مقایسه با اینورتر دوقطبی شکل موج خروجی سینوسی بهتری می دهد.